


Ohand(OYmotion)
Features
•
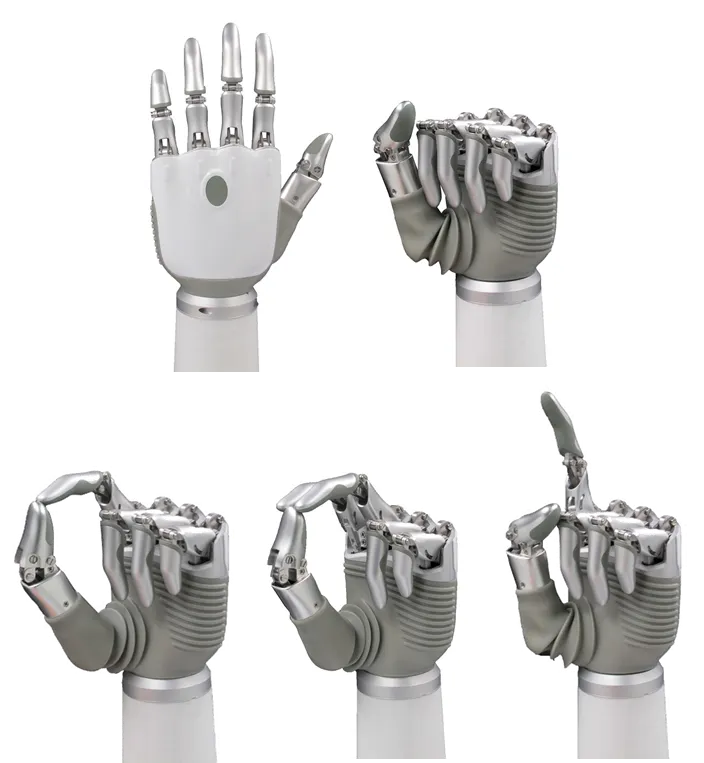
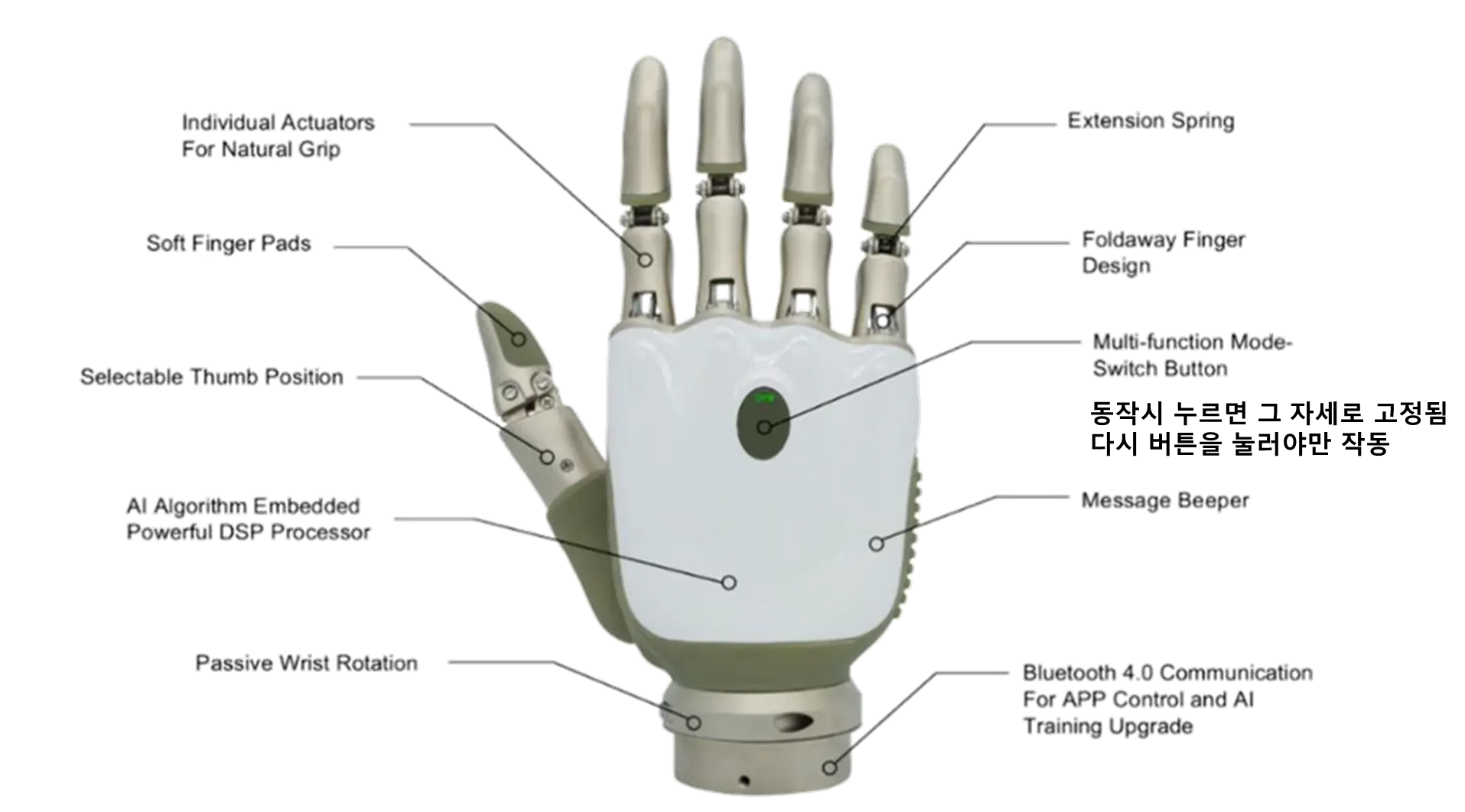
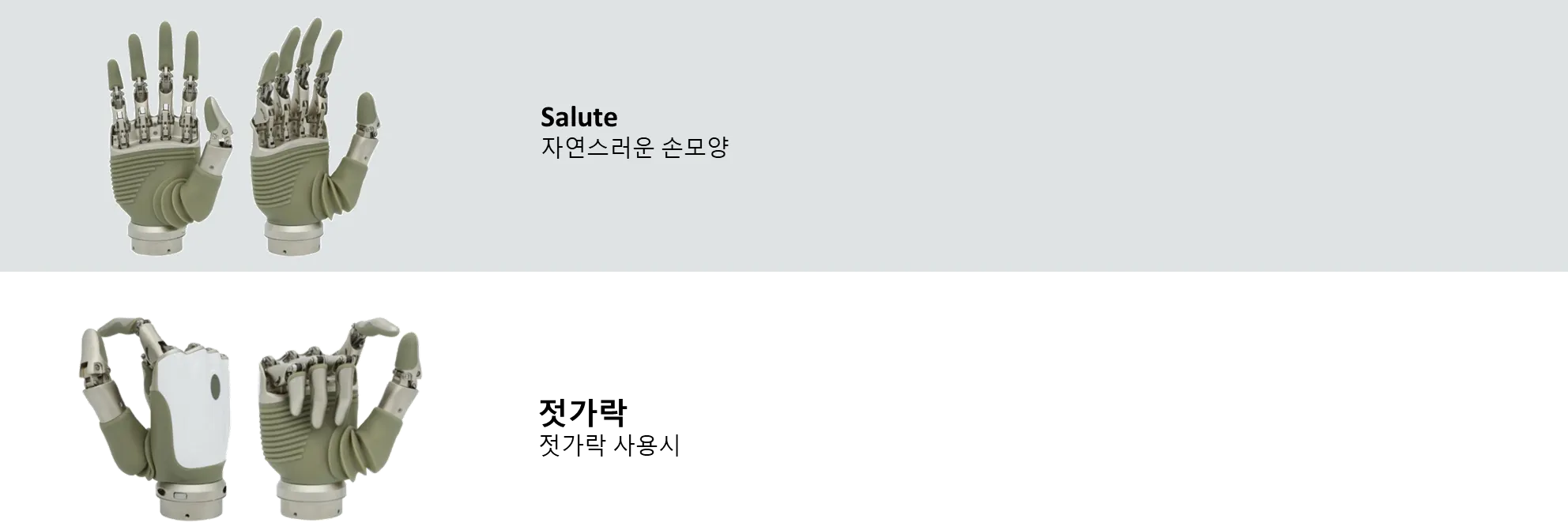
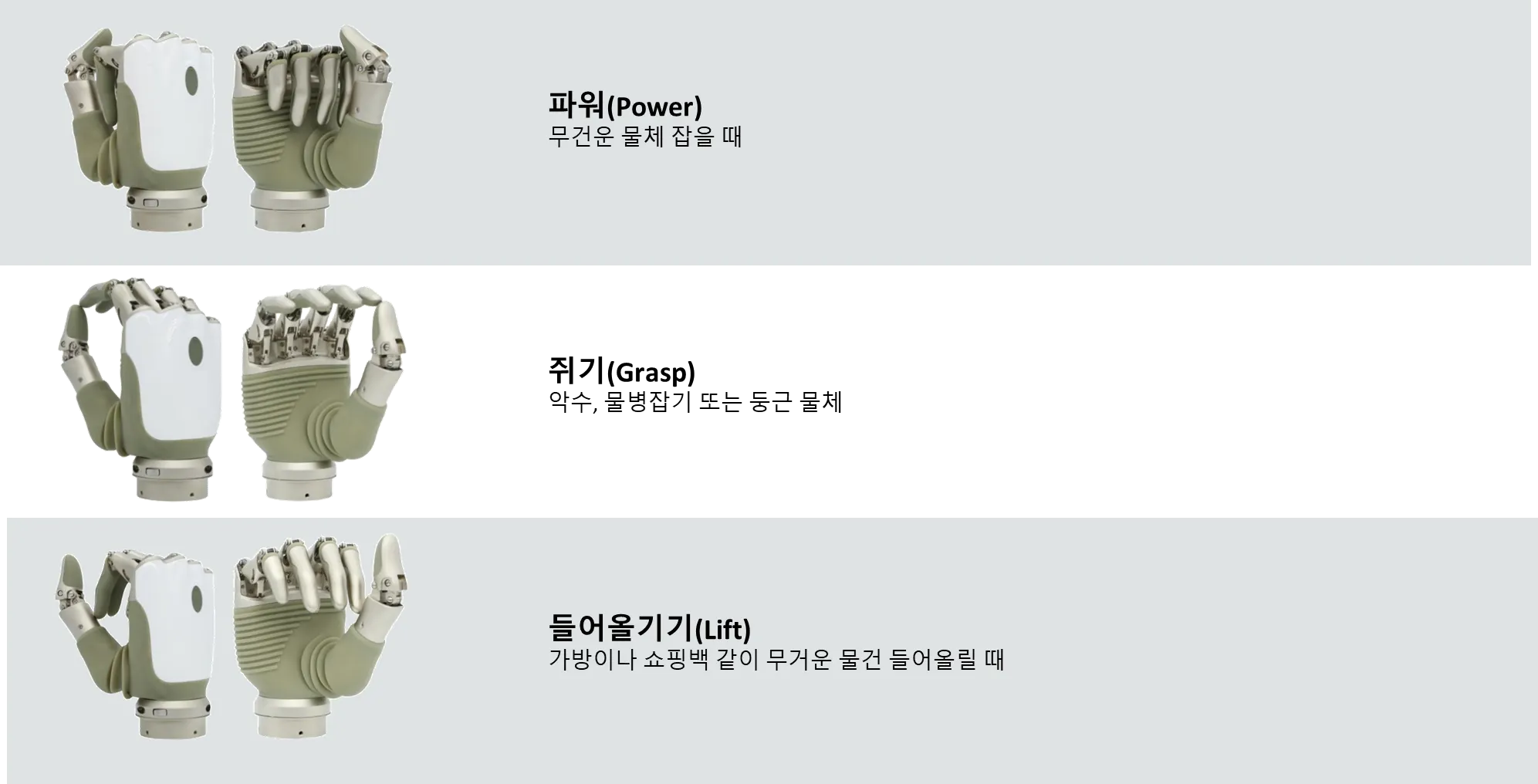
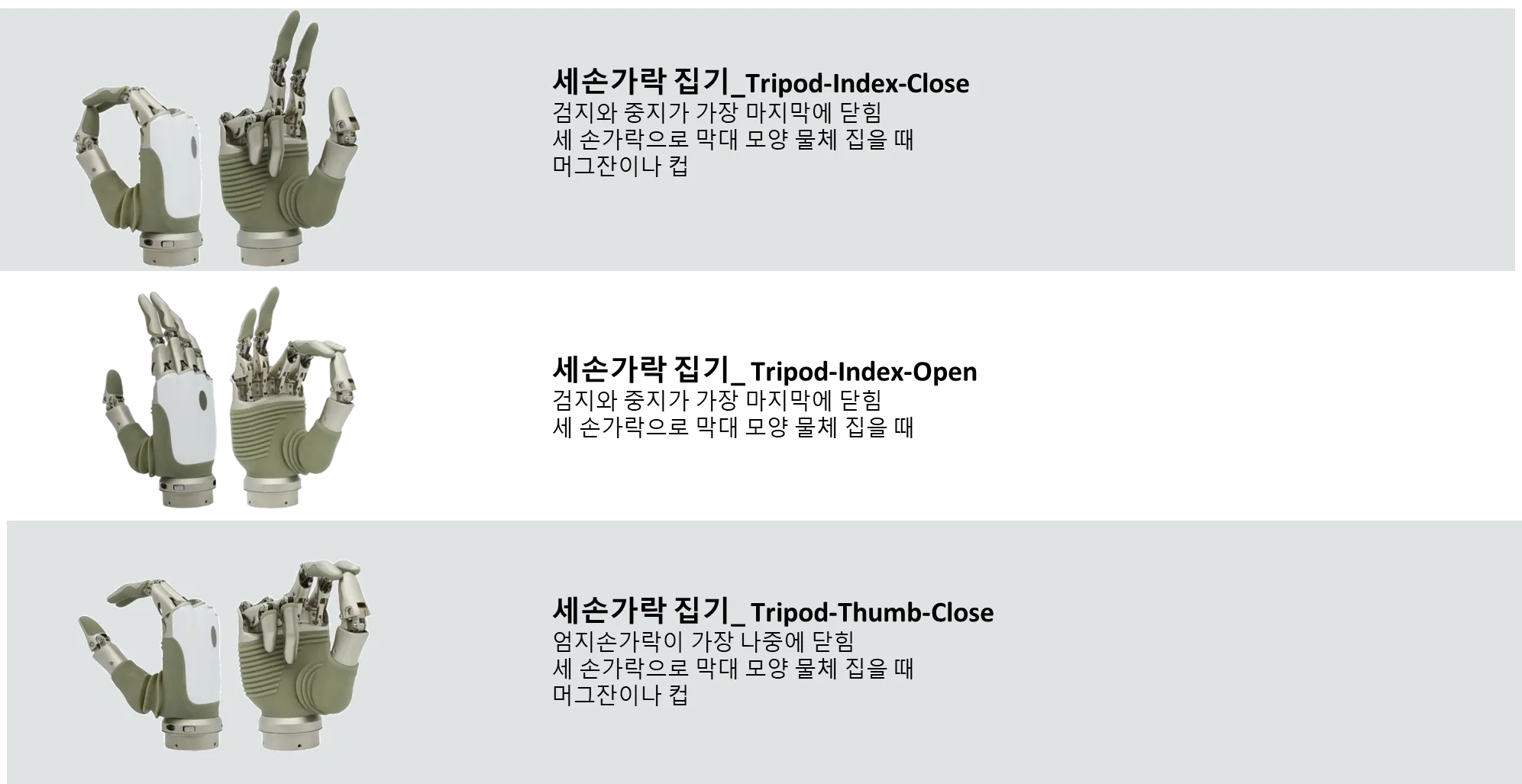
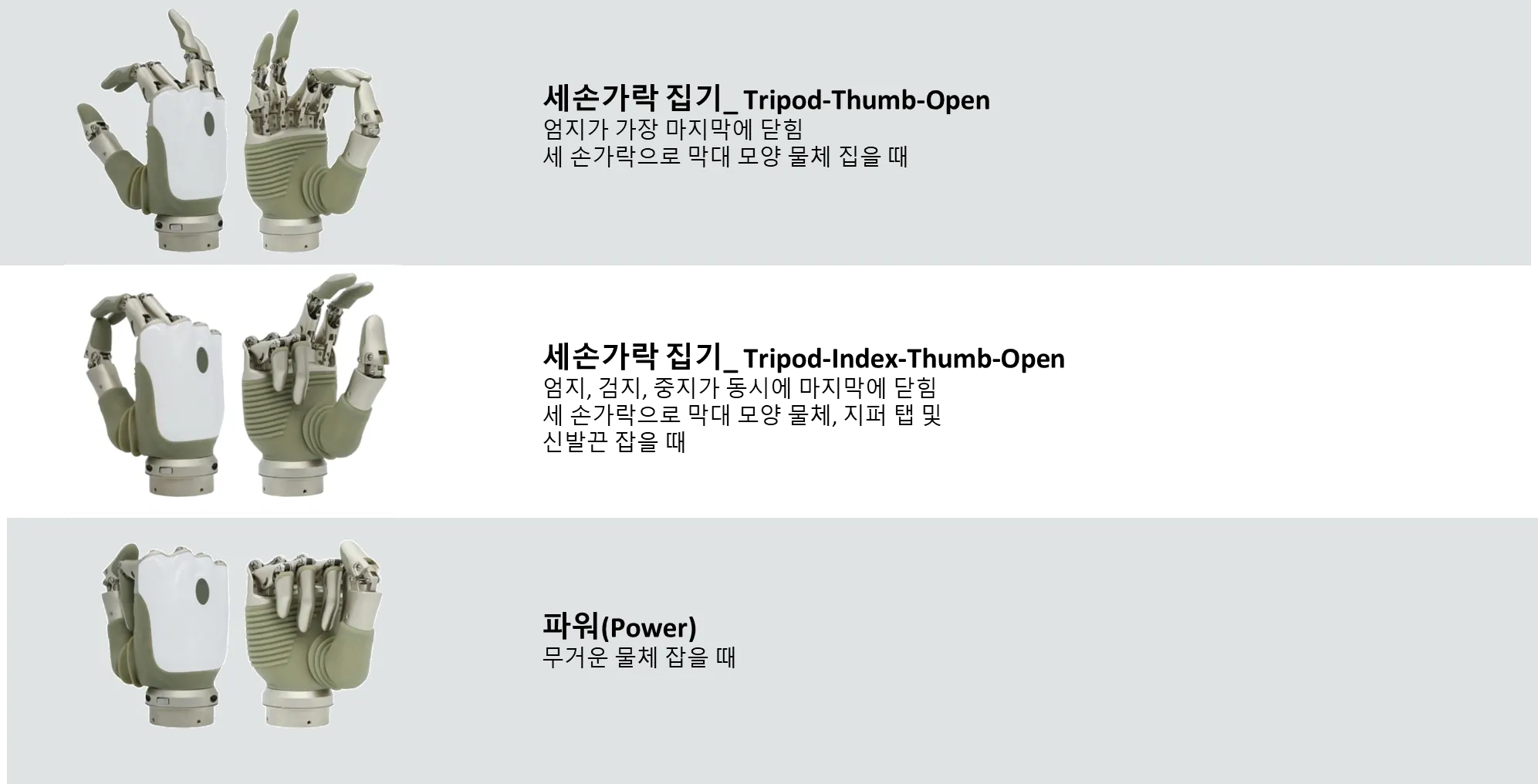
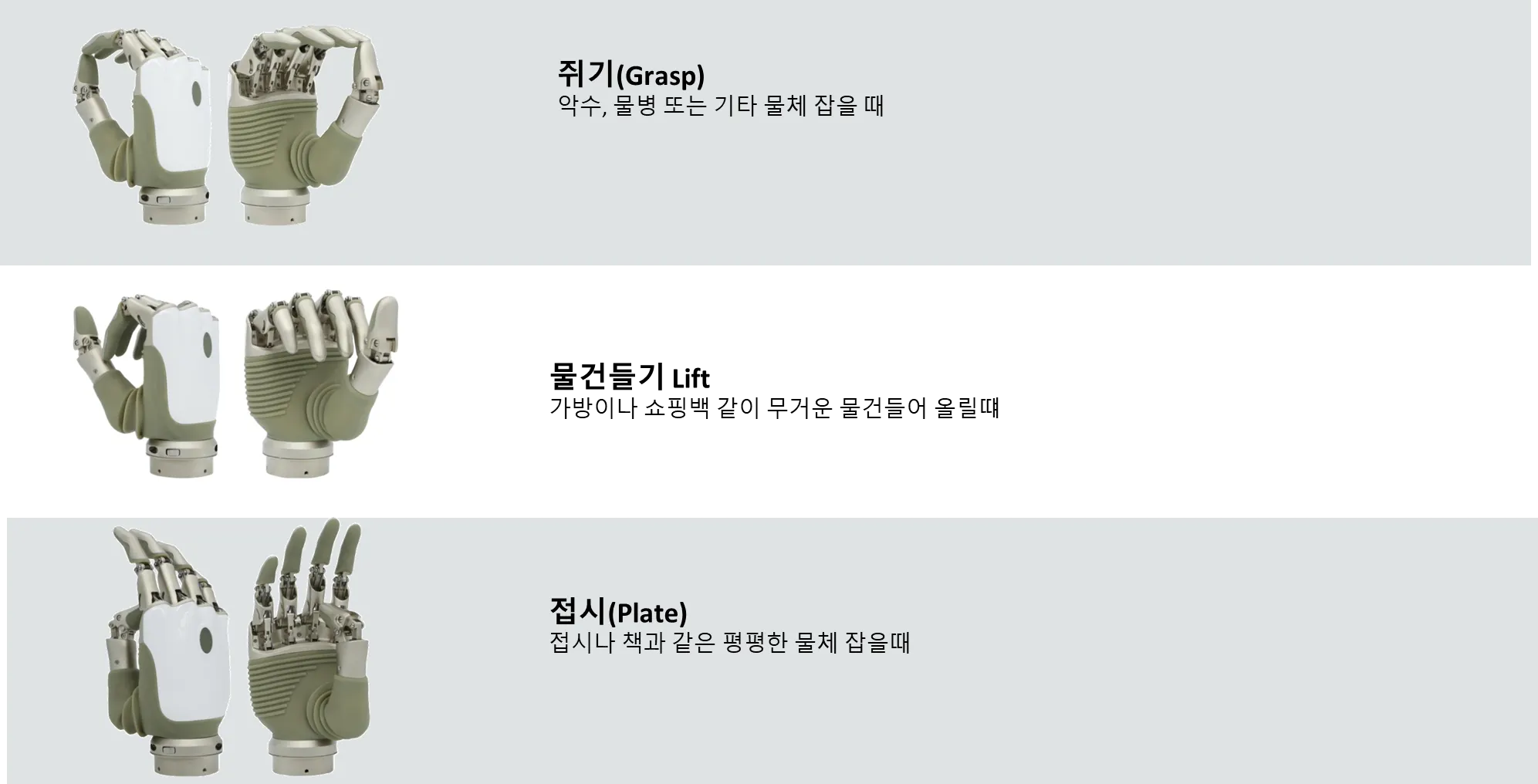
Artificial hand that perfectly mimics the structure and movement characteristics of the human hand (27 motions in total)
•
Supports up to 8-channel EMG
•
Lower cost compared to conventional biomimetic artificial hands
•
Motion implementation through EMG measurement
•
Motion intent recognition and artificial hand control using AI algorithms
•
Motion control available through a dedicated app
•
EMG threshold adjustment available through the dedicated app
•
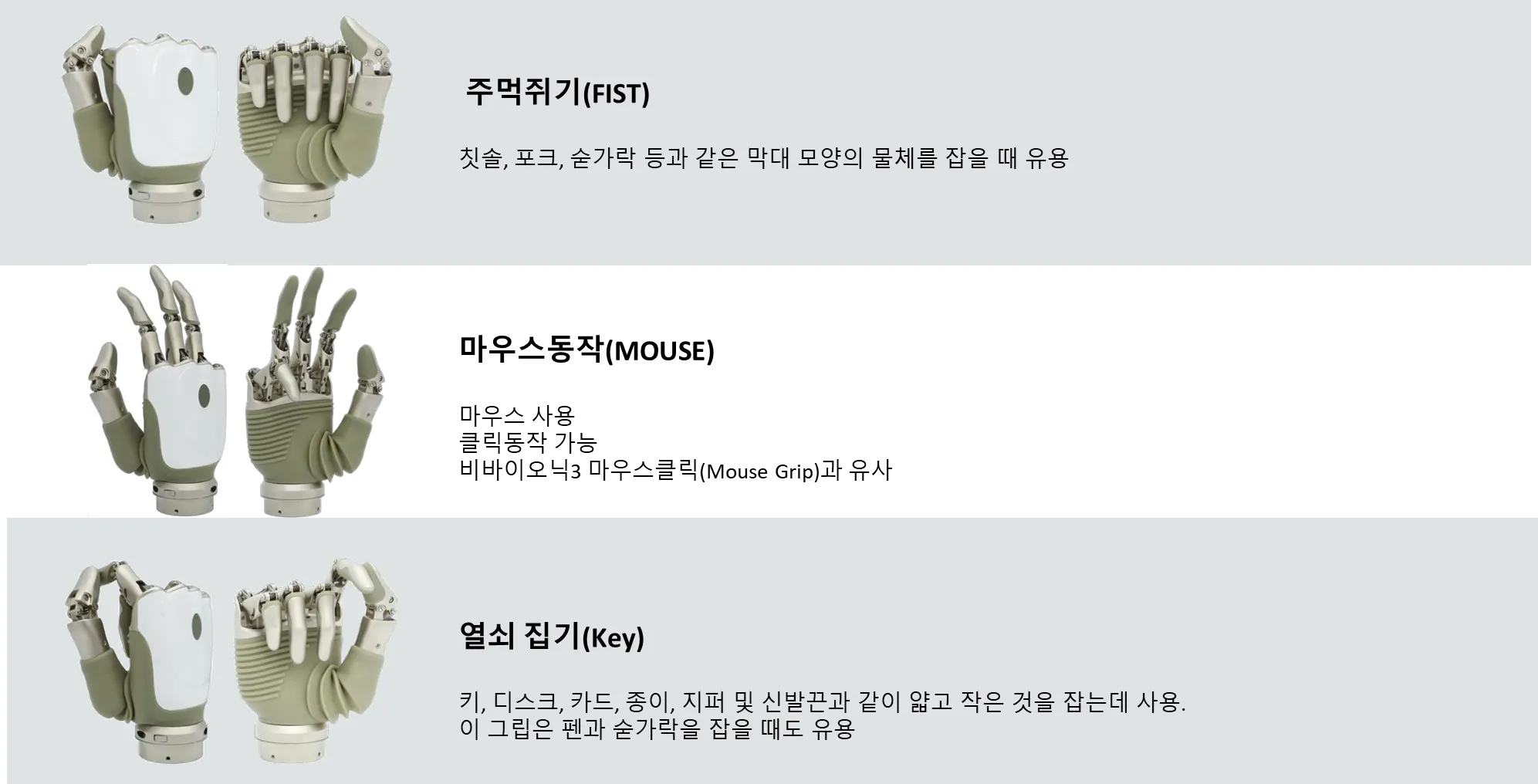
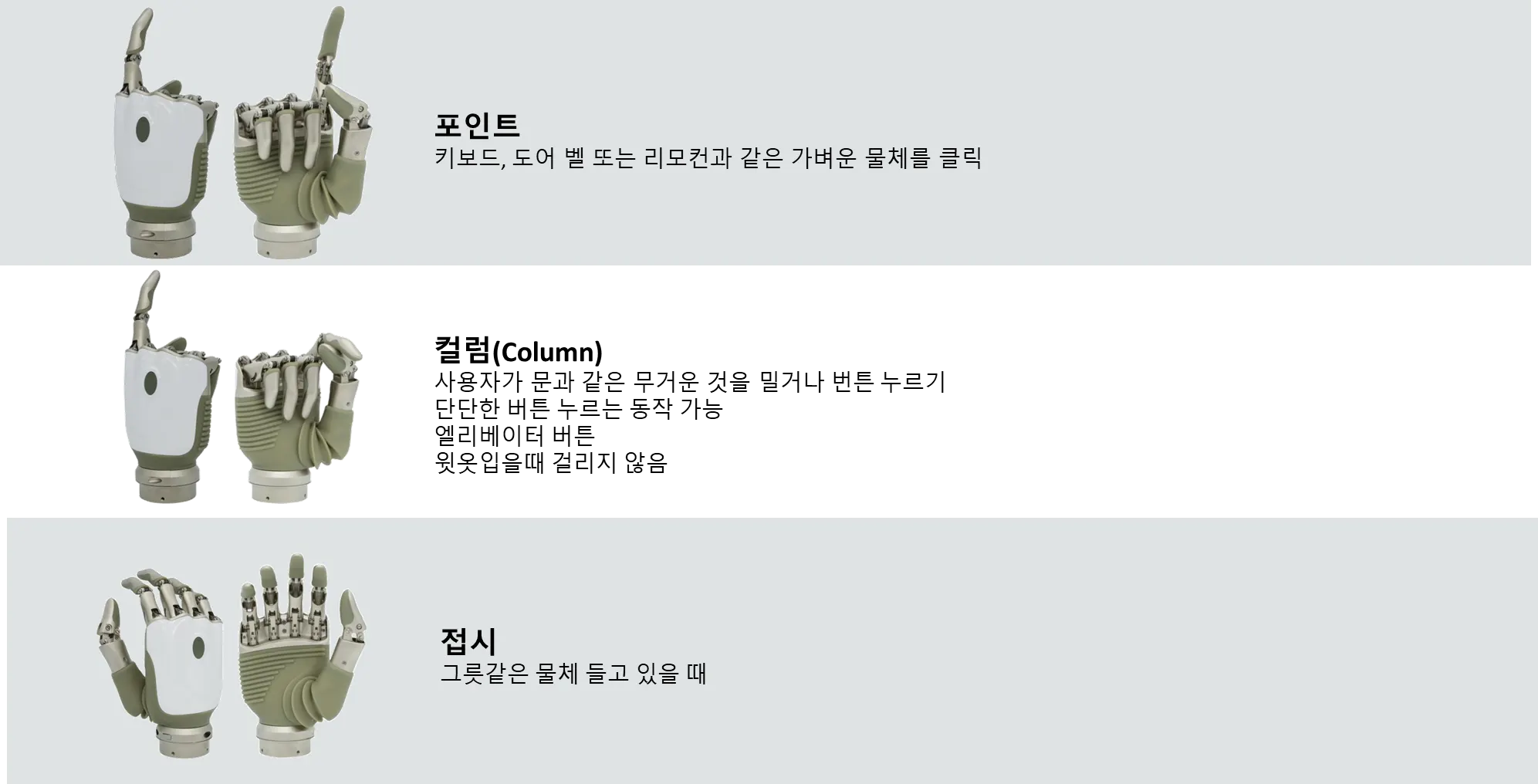
In the dedicated app, two modes are available, and three grip motions can be set for each mode
•
Mode switching is possible by pressing the button on the back of the hand
•
Manual wrist rotation available
•
Battery life: 12 hours (internal)
•
Continuous use enabled with a dedicated USB-C charging port
API
•
Researcher-developed motion recognition algorithms can be directly used as input signals
•
Desired hand movements can be implemented by researchers
•
Dedicated API and UART communication board provided
•
Basic 2-channel EMG electrodes provided / (Optional) 8-channel EMG electrodes
Specification
Specification | Parameters |
Max Time to Open | ≤ 1.0 Second |
Max Time to Close | ≤ 1.0 Second |
Max Single Finger Tip Force | ≥ 0.45 KG |
Max Thumb Finger Tip Force | ≥ 1.1 KG |
Max Tripod Tip Force | ≥ 1.1 KG |
Max Static Load (hook grip) | 30 KG |
Max individual Finger Load (hook) | 6 KG |
Max Finger Tip Extenstion Load | 5 KG |
엄지위치




 Download
Download 