



Features
•
6DOF
•
ROS/ROS2
•
RS485 interface
•
ModBus/Serial communication
•
A derivative product from the prosthetic hand, designed to mimic human hand movements and shapes, thereby replicating the functions of a human hand.
Structure
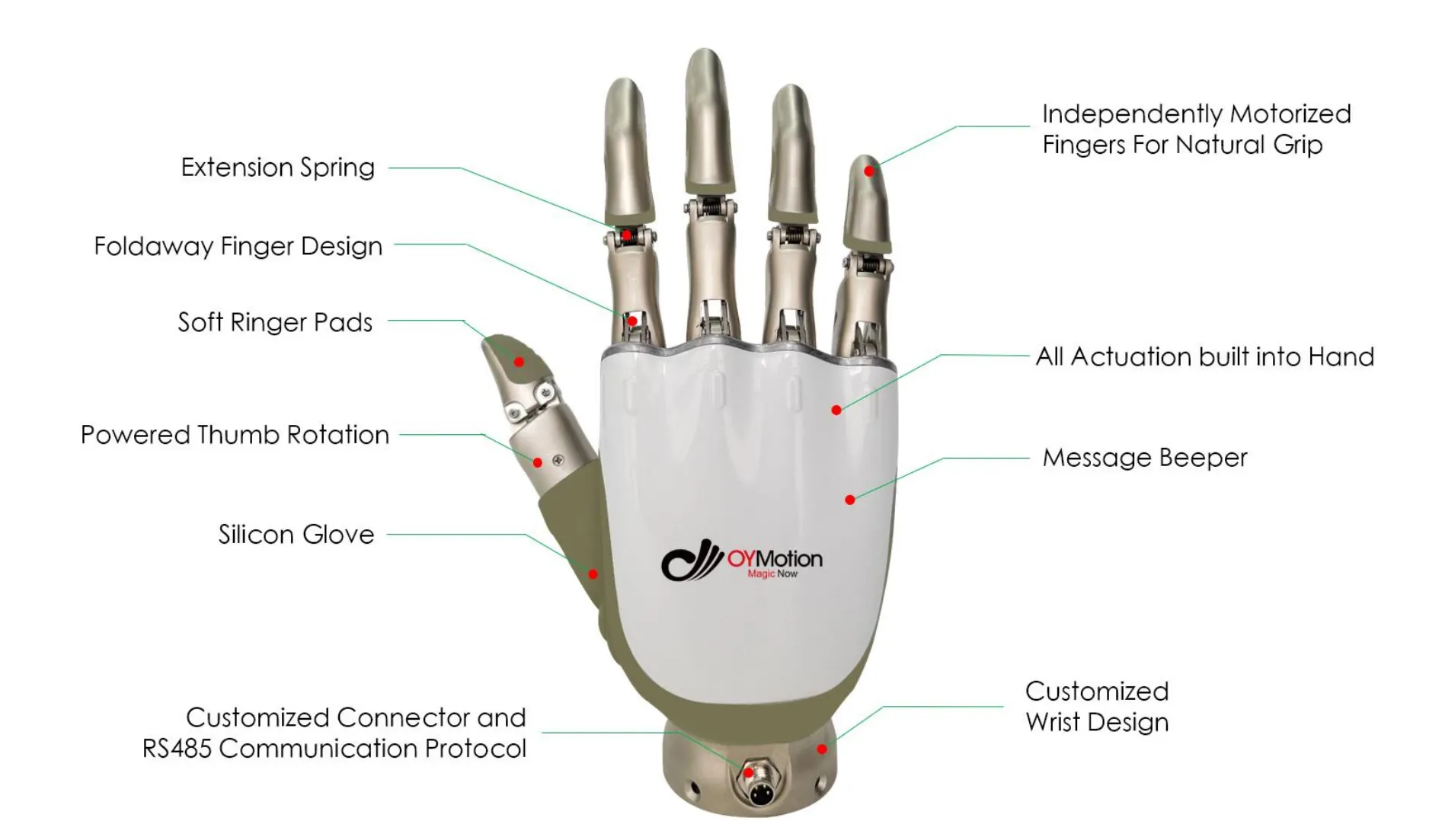

ROhand
Dimension
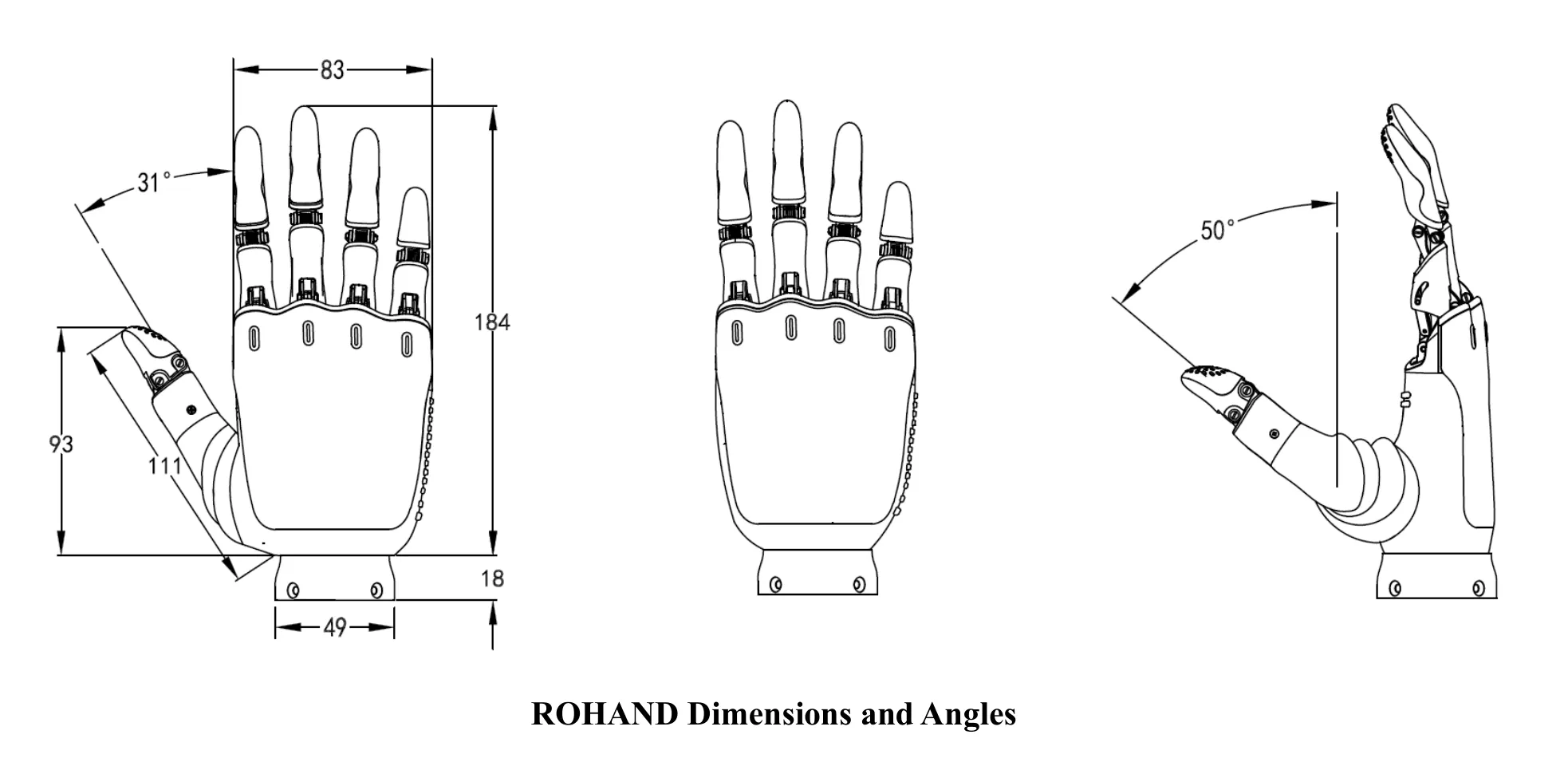
Measurement location | Dimensions and angles |
Vertical distance from the tip of the middel finger to the wrist | 184 mm |
Verticl distance from the thumb tip to wrist | 93 mm |
Thumb length | 111 mm |
Maximum palm width | 83 mm |
Wrist diameter | 49 mm |
Maximum opening and closing angle of the thumb side | 0 ~ 31 Degrees |
Maximum opening and closing anlge of the thum to the palm | 0 ~50 Degrees |
Thumb lateral roation angle | 0 ~ 90 Degrees |
Finger tocuh screen function | Supported |
Weight: 545g±5g
Specification
Measuring Position | Parameters |
Fastest time from fully open to fully closed finger | 1.0 second |
Fastest time from fully closed to fully open finger | 1.0 second |
Fastest time from thumb side and opposite palm rotation | 1.0 second |
Maximum active thrust force of the index finger tip | ≥ 0.45 Kgf |
Maximum active thrust force of thumb tip | ≥ 1 Kgf |
Maximum active pinching force of two/three fingertips | ≥ 1 Kgf |
Maximum weight lifted (power grip) | 30 Kg |
Maximum single finger static load (power grip) | 10 Kg |
Maximum static load on fingertip of single finger (flat extension) | 8 Kg |
Our Clients

Use case
Case 1: R&D & Education
•
Ready for Immediate Research Use: Fully supports ROS/ROS2 and provides a Python API
•
Cost-effective 6-DOF Articulated Hand


Case 2: Manufacturing
•
Human-like Dexterous Grasping: Effortlessly handles irregularly shaped objects of various forms.
•
Fingertip Force Sensors: Delicately grasps fragile items, such as eggs, without breaking them.


Case 3: Service & Retail
•
Natural HRI: Designed to the exact dimensions of a human hand, enabling approachable and non-intimidating Human-Robot Interaction
•
AMR Integration: Seamlessly integrates with mobile robots (AMRs) like Keenon to perform tasks such as pressing elevator buttons


Case 4: Tele-operation
•
Control Method: Real-time teleoperation via dedicated Dataglove.
•
Ease of Use: Direct mirroring of human gestures enables intuitive operation with zero teaching required.



 Download
Download