


(타싼 센서 성능)
Tactile Sensing
첨단 촉각 센싱 기술은 이제 단순한 힘 감지를 넘어, 촉감·압력·근접·마찰·재질 변화까지 읽어내는 새로운 차원의 로봇 감각을 가능하게 합니다.

사람의 손처럼 섬세하게 반응하는 로봇 핸드는 제조·서비스·의료 로봇 분야의 정밀성을 크게 확장합니다.
(AP001에는 타싼 포스센서가 들어가 있고, AP002에는 촉각센서가 들어가 있습니다)
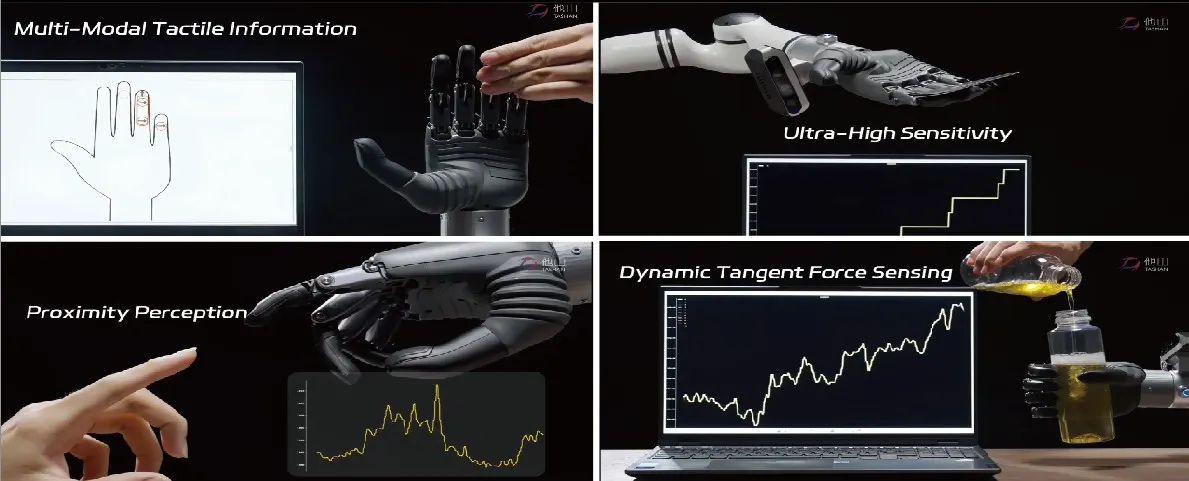
Multi-Modal Tactile Information
로봇 손가락에 장착된 멀티모달 센서는 힘(Force), 압력 분포(Matrix), 온도, 재질, 근접 거리 등을 실시간으로 분석합니다.
이 기술은 단순히 ‘눌림’을 감지하는 센서를 넘어, 사람이 손끝으로 느끼는 촉감을 데이터로 재현합니다.
•
미세한 압력 차이 감지
•
표면 질감 인식
•
다중 센서 융합 기반 정확한 조작

Ultra-High Sensitivity
매우 작은 힘의 변화도 즉각적으로 포착합니다.
이는 로봇이 깨지기 쉬운 물체, 얇은 필름, 작은 부품을 다룰 때 필수적인 능력입니다.
•
수그램 단위의 미세 힘도 감지
•
반응 지연 최소화
•
정밀 조립 및 실험용 로봇에 최적화

Proximity Perception
비접촉 감지(근접 인식)
촉각 센서는 손가락이 물체에 닿기 전, 약 1~2cm 거리에서 물체의 존재를 감지할 수 있습니다.
이 기능은 물체 충돌을 방지하고 휴머노이드 로봇이 사람과 상호작용할 때 안전성을 높여줍니다.
•
비접촉 물체 감지
•
사전 회피 제어
•
정밀 접근 및 소프트 터치 완성

Dynamic Tangent Force Sensing
동적 마찰력·전단력 센싱
로봇은 물체의 미끄러짐, 진동, 회전력 등을 실시간 감지해 그립을 자동으로 조절합니다.
•
미끄럼 발생 예측
•
파지력 자동 조정
•
동적 작업 환경에서의 안전성 향상
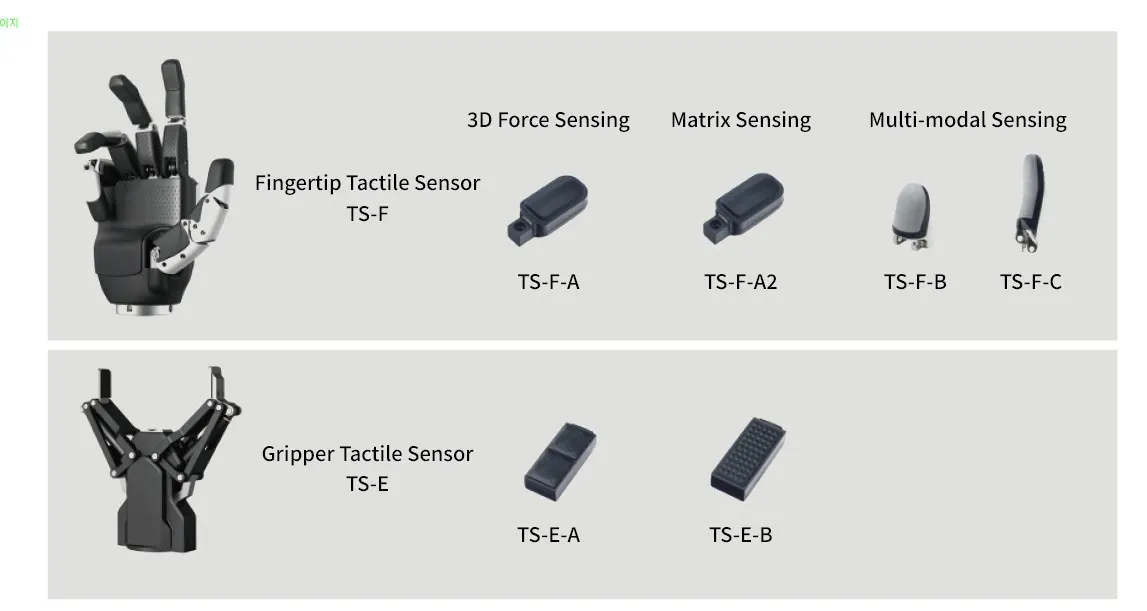
모델 | 센싱 방식 | Normal Force Range | Normal Force Resolution | Tangential Resolution | Accuracy | 비접촉 감지 거리 |
TS-F-A | 3D Force Sensing | 0–20 N | 0.1 N | 0.25 N | 5% FS | ≥1 cm |
TS-F-A2 | Matrix Sensing | 0–50 N | 0.1 N | 0.25 N | 5% FS | ≥1 cm |
TS-F-B | Multi-modal Sensing | 0–20 N | 0.1 N | 0.25 N | 5% FS | ≥1 cm |
TS-F-C | Multi-modal Sensing (Nail Type) | 0–20 N | 0.1 N | 0.25 N | 5% FS | ≥2 cm |
TS-E-A | 3D Force Sensing | 0–50 N | 0.1 N | 0.25 N | 5% FS | ≥1.5 cm |
TS-E-B | Matrix Sensing | 0–50 N | 0.05 N | 0.25 N | 5% FS | ≥1.5 cm |
납품 사례

활용 사례
1. 정밀 전자부품 및 미세 조립 (Precision Assembly)
2. 비정형 및 파손주의 물체 파지 (Fragile Object Handling)
3. 협동로봇 안전 및 HRI (Human-Robot Interaction)
4. AI 강화학습 및 디지털 트윈 (AI Learning & Digital Twin)

Vision-Touch Fusion Technology Platform
로봇이 ‘보고’ 동시에 ‘느끼는’ 새로운 지능의 시대
Vision–Touch Fusion 플랫폼은 카메라 기반의 시각 정보(Vision)와 AI 촉각 센서(Touch)를 통합하여
로봇이 사람의 인지 과정처럼 환경을 이해하도록 만드는 차세대 지능형 인터페이스입니다.
이 기술은 단순한 물체 인식이나 힘 감지를 넘어, 기계가 스스로 사물을 보고 판단하고 조작하는 능력을 극적으로 향상시킵니다.
Vision + Tactile = 초정밀 물체 이해
로봇은 카메라로 물체의 형상·위치·재질을 파악하고, 촉각센서로 힘·압력·미끄럼·질감·접촉 상태를 동시에 분석합니다. Vision만 의존하는 로봇은 빛, 그림자, 반사광, 가려진 물체 등에 취약합니다.
하지만 Vision–Touch Fusion은 촉각이 시각의 불확실성을 보완하고 시각이 촉각의 한계를 보완하여
어떤 환경에서도 높은 안정성을 유지합니다.
NVIDIA isaac Sim에서 Tactile Sensor에 유일하게 등록
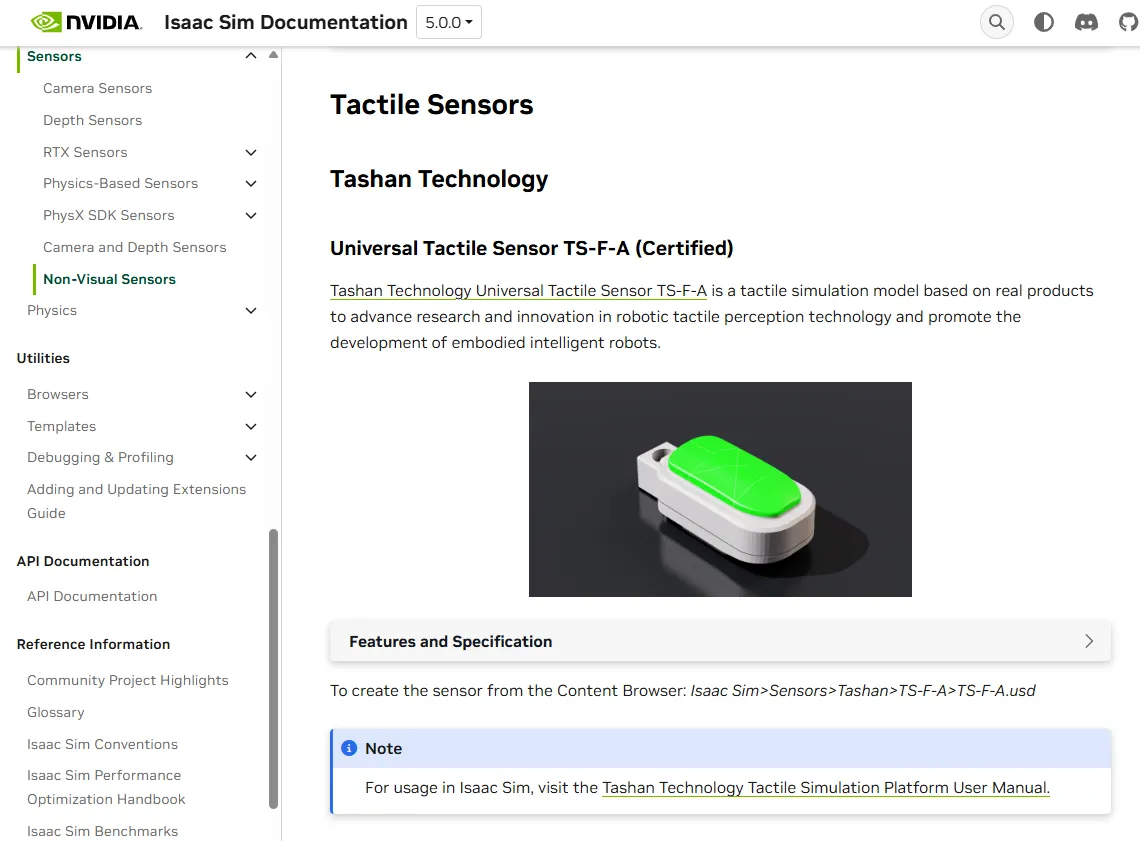
AI 기반 로봇의 개발, 시뮬레이션, 데이터 생성, 학습, 디지털 트윈 운영까지 적용이 가능합니다