




특징
•
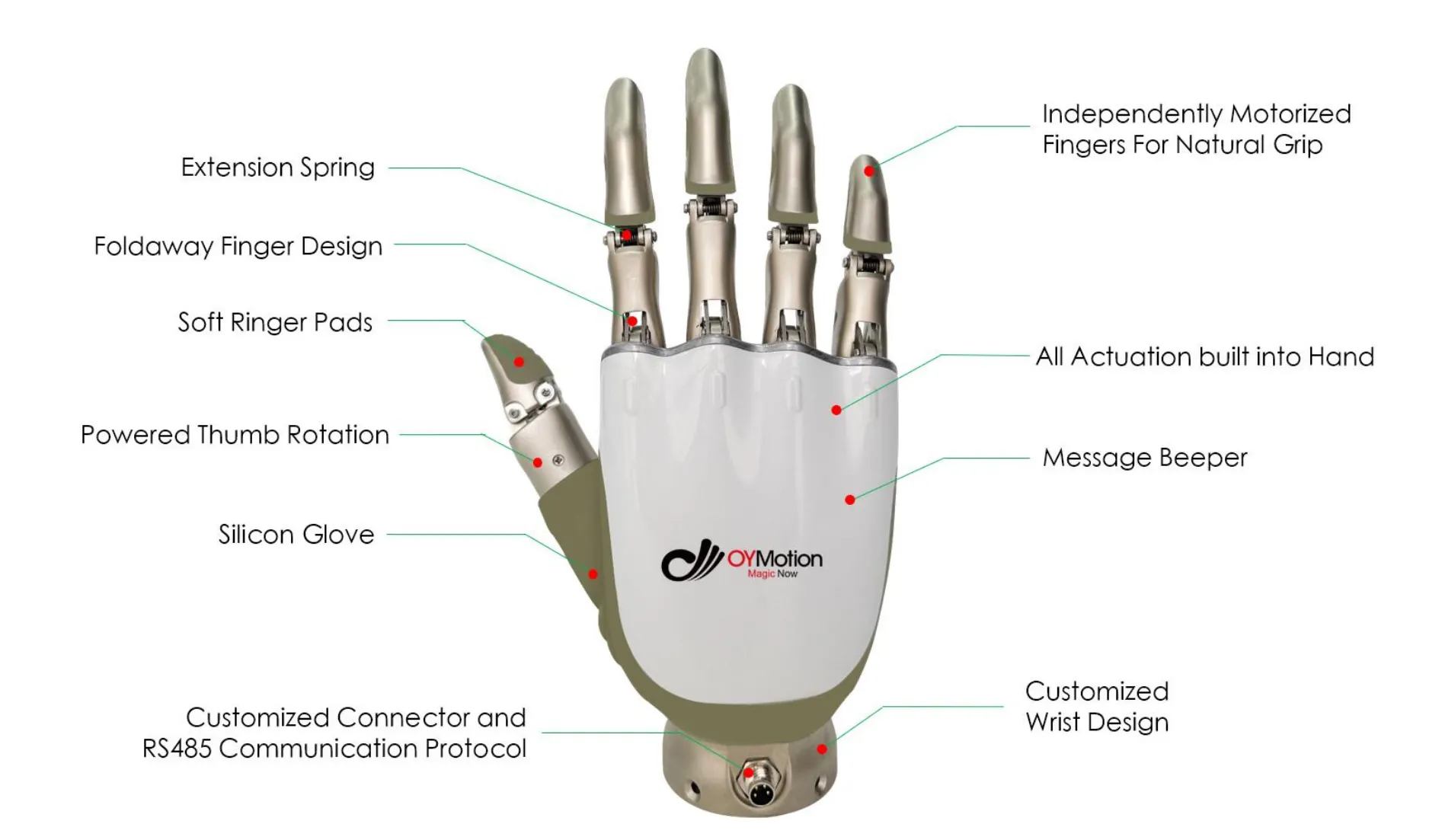
전자의수 기술 노하우가 집약된 6자유도(6-DOF) 매커니즘으로 사람 손의 섬세한 움직임을 완벽 구현
•
전용 데이터 글러브(Data Glove) 연동을 통한 실시간 원격 제어(Mirroring) 및 티칭 지원
•
ROS / ROS2 패키지 및 Python/C++ API 제공으로 복잡한 세팅 없이 즉시 연구 개발 가능
•
RS-485, Modbus 등 표준 통신 인터페이스 지원으로 다양한 로봇 팔 및 PLC와 손쉬운 연결
•
전자의수로부터 파생된 제품으로 사람의 손동작 및 형태 등을 모방하여 사람의 손 기능 모방

ROhand
구조
크기
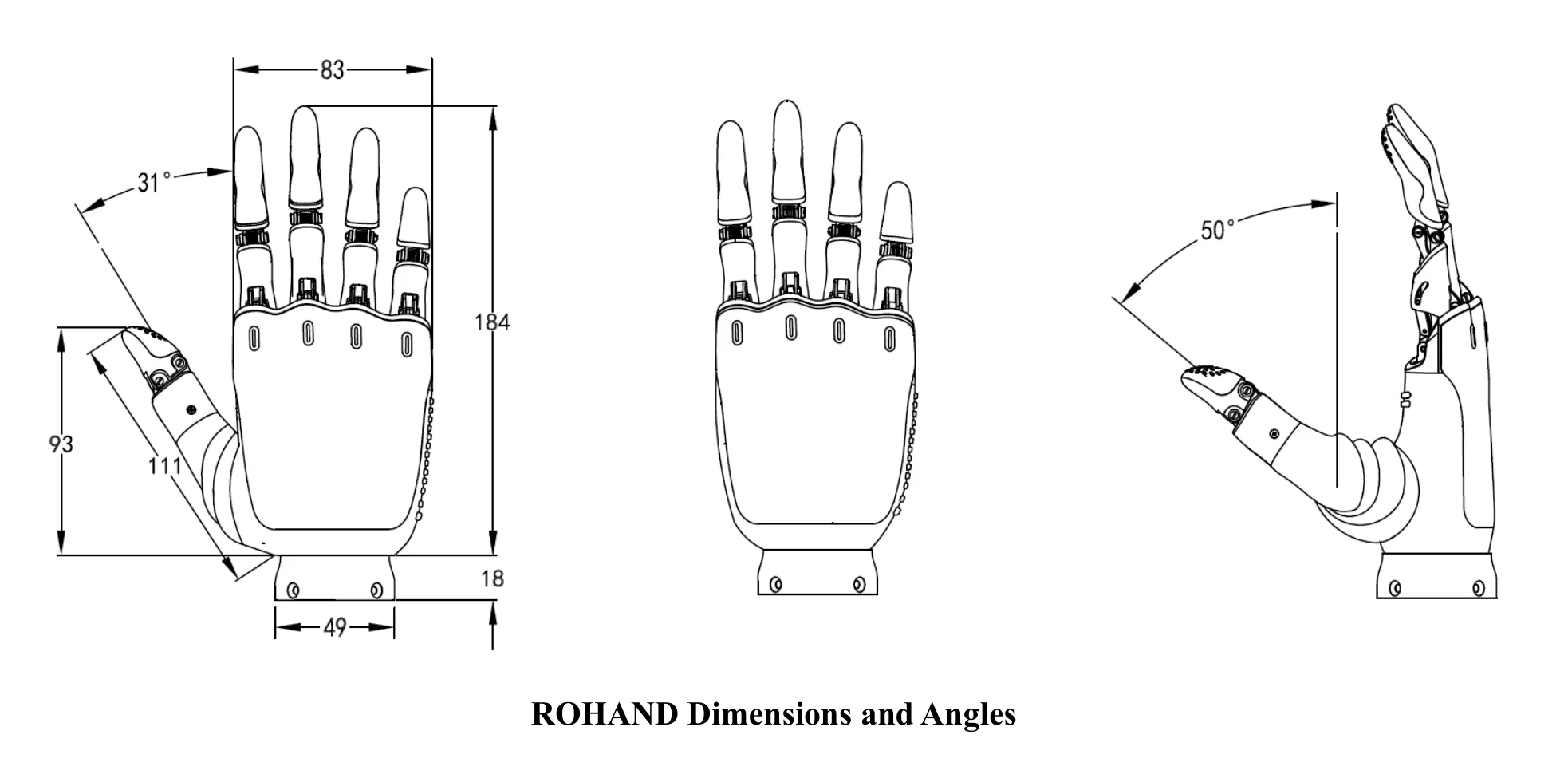
Measurement location | Dimensions and angles |
Vertical distance from the tip of the middle finger to the wrist | 184 mm |
Verticl distance from the thumb tip to wrist | 93 mm |
Thumb length | 111 mm |
Maximum palm width | 83 mm |
Wrist diameter | 49 mm |
Maximum opening and closing angle of the thumb side | 0 ~ 31 Degrees |
Maximum opening and closing anlge of the thum to the palm | 0 ~50 Degrees |
Thumb lateral rotaion angle | 0 ~ 90 Degrees |
Finger touc sh screen function | Supported |
무게: 545g±5g
사양
Measuring Position | Parameters |
Fastest time from fully open to fully closed finger | 1.0 second |
Fastest time from fully closed to fully open finger | 1.0 second |
Fastest time from thumb side and opposite palm rotation | 1.0 second |
Maximum active thrust force of the index finger tip | ≥ 0.45 Kgf |
Maximum active thrust force of thumb tip | ≥ 1 Kgf |
Maximum active pinching force of two/three fingertips | ≥ 1 Kgf |
Maximum weight lifted (power grip) | 30 Kg |
Maximum single finger static load (power grip) | 10 Kg |
Maximum static load on fingertip of single finger (flat extension) | 8 Kg |
디자인

납품 사례

활용 사례
Case 1: 연구 및 교육 (R&D & Education)
•
ROS/ROS2 완벽 지원 및 Python API 제공으로 즉시 연구 투입 가능
•
합리적인 가격의 6자유도(6-DOF) 다관절 핸드


Case 2: 스마트 팩토리 & 정밀 조립 (Manufacturing)
•
인간의 손과 같은 유연한 파지로 다양한 형상의 비정형 물체 핸들링
•
손끝 포스 센서(Force Sensor)로 달걀 같은 껍질도 깨지 않고 파지


Case 3: 서비스 & 푸드테크 (Service & Retail)
•
사람 손 사이즈와 동일한 디자인으로 거부감 없는 HRI(Human-Robot Interaction) 구현
•
키논(Keenon) 등 모바일 로봇(AMR)과 결합하여 엘리베이터 버튼 조작 가능


Case 4: 원격 제어 & 위험 작업 (Tele-operation)
•
전용 모션 캡처 글러브(Dataglove)를 통한 실시간 동기화 제어
•
작업자의 손동작을 그대로 모방하여 별도의 티칭 없이 직관적 작업 가능


호환성
협동로봇 & 하드웨어 (Hardware Compatibility)
•
•
 자료다운로드
자료다운로드